UAV Forge has made a task timeline to help synchronize each of the team’s progress. It’s a definite eye-opener on where the work is being down and why some teams are behind in their tasks. Week 4 is another result of slow progress.
The Propulsion team has assembled and tested the plane’s 2nd motor. They encountered an unusual balancing issue. The motor spins correctly but the tilt rotors are causing the entire system to lean on left side. The team has generated numerical data on the tilt rotor’s roll rate. The angular acceleration dw/dt is 198.1 degree per second squared and the angular velocity ω = 133.9 degree per second. This data means that the rotors can turn in half a second to achieve a maximum velocity (angular acceleration divided by angular velocity produces this).
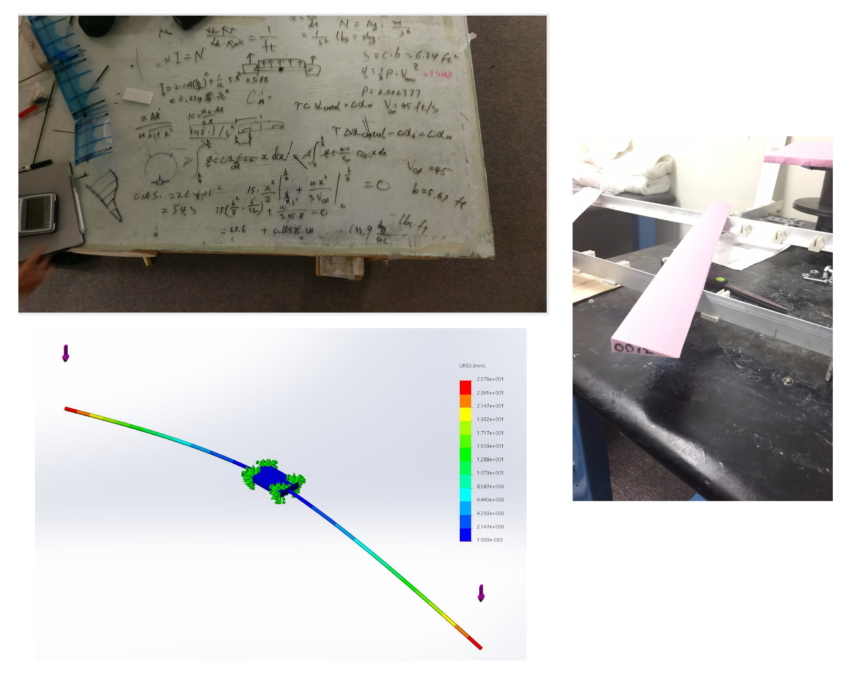
Next, the Mechanical Design team has simulated the wing spar deflection caused by tilt rotors. They created a mock center piece where the spar would pass through and placed static loads on the ends of the spar. They found that the max displacement was less than 2 inches. This deflection should be should satisfactory for now. The team is continuing to fix the frame for FEA testing and are working on the threaded inserts for the spar.
The Fabrication team has cut out the plane’s foam control surfaces (the picture shows a horizontal tail piece) and have laser cut the airfoils for the wing assembly. They will begin manufacturing the fiberglass layups
Ground Station has finished updating the new Qt program and has begun working on the new GUI library that will be using widget functions such as MapWidget and GraphWidget. The new library should make the GUI interface compatible various platforms (computers, web service, mobile, etc.). They are using UML diagrams to help organize their work better. Next week, the team will work on the network library, improve their JavaScript-to-C++ bridge, and test the database code.
The Avionics team has purchased a new LiDar for I2C testing. They found that the radio receiver reads for the R/C input, meaning the plane can receive instructions. Because there is no need for an additional Arduino to re-interpret the R/C input, the team is creating a new design where they will program the R/C input directly to the servos by using the Pixhawk and two TH-2 Mixers (one for each rotor). Avionics has also determined the sonor’s threshold for obstacle avoidance, now they must program the Pixhawk to interrupt and modify the plane’s flight path appropriately. Lastly, the team is designing a custom closed-system battery bus that distribute power through XT-60 connections to two voltage regulars and two ESCs.