This week, UAV Forge is transitioning their leadership for the next school year. The new Project Leads will be Ariel from Mechanical Design and Kristen from Fabrication. Together, with the Purchasing, Safety, and Document Managers New project leads will determine how the project will continue its journey to completion. The Project Leads will pick the new team leads based on nominations made by the current/out-going team leads. The Project Leads will let the nominees decide whether they would accept or decline the position offered to them.
Now moving on to the team’s progress.
The Propulsion team has replaced all the servos that were burned from the previous flight test but they have melted another controller board during some tests. The controller board is connected to the 8 actuating servos, the Pixhawk controls the error in the control signal. The Pixhawk was a back-up plan for the controller board but it doesn’t have enough pins to control all components. They believe the problem stems from a faulty servo pin. The team lead has considered buying an entire tilt rotor kit for research purposes.
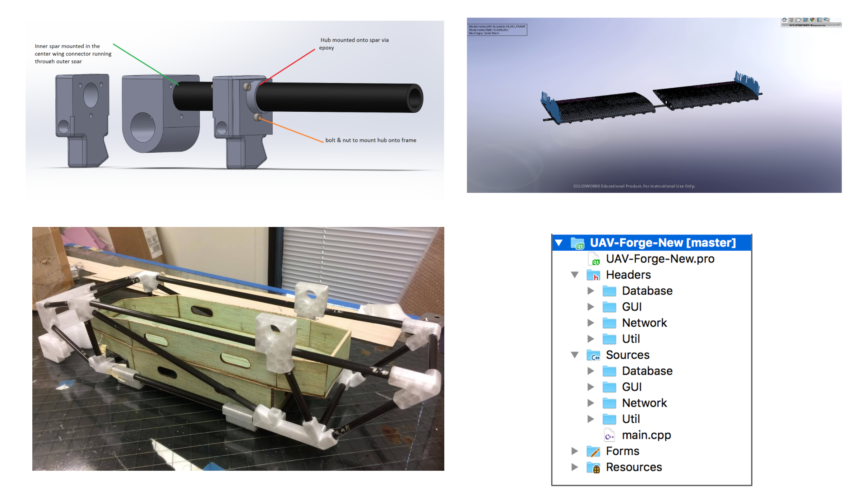
The Mechanical Design team has finished another iteration of the modular wing connector. The hub was 3D printed but due to general print limits, the holes in the model were a little small. The team has also begun running stress simulations for in-flight conditions. The team is having issues with the fixed boundary limits and the force vectors.
Fabrication has almost finished the plane’s frame but they ran out of materials. They need to cut more carbon fiber rods for frame. They also need more material for creating layups for the fuselage. The team is working on adding foam in between the airfoil’s trailing edge to make monokoting easier in the future. Again, the problem with the trailing edges of the wing assemble is the laser cutting has created jagged edges that will rip the monokote.
Ground Station has fixed problems in the Mission Loading and Saving functions. They have organized their code better by spitting the project files into multiple folders and moved the code to their proper locations. Then they isolated the current network code from the rest of the project to make it easier to integrate the MAVLink code in the future. They are still researching on how MAVLink code operates in the APM Planner so that they can map the MAVLink code into the project’s network code.
Avionics has identified a LiDar variable “sonarrange” from the Mission Planner program. They are searching where this variable’s data range is stored in and they believe it could be inside the Pixhawk data. Then, the team has verified the tilt rotor electronics system after the servos were replaced by Propulsion. They found that the failed flight test had affected more components. A TH-2 mixer couldn’t control the left heli-servo #2 due to a faulty pin that didn’t produce an output signal. They concluded that the test failure was due to the limits of the voltage regulator. They assumed the regulators control the voltage to a specific value, but in reality, the control was range of values. Avionics is still working on a customized battery bus and switching circuit. Although one design was created, they are looking for commercial alternatives.
These small but important issues have set our progress back and hopefully we can get them resolved by the next week.