The Propulsion team was originally having trouble getting the tilt-rotor’s servos to rotate the correct direction and they have found a solution: using a programmable servo. The team is still working on replacing the servos on the tilt-rotor prototype. Because the replacement servos are different from the original ones, Propulsion must replace all the servos, on the left and right tilt-rotors.
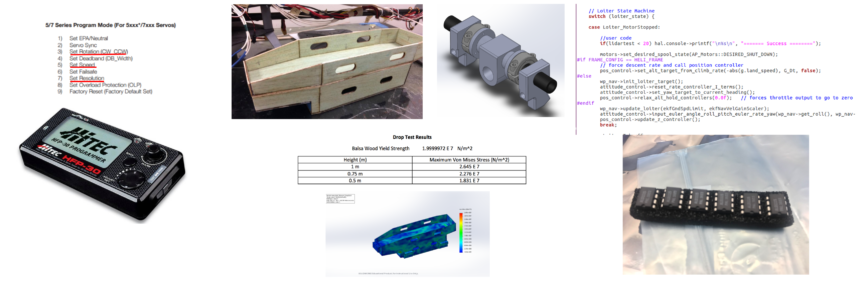
Mechanical Design has completed a second iteration of the wing connector hub. The Chief Engineer, Cheng, was changing the design of the frame. Originally, the frame has a solid, T-shape part that holds the boom and wing spar together. Now, the T-shape part has been divided into three separate parts, to reduce the weight of the part. Another issue is the amount of space the hub occupies, as there is only a small gap where the wing rib of the wing spar assembly touches the outer frame joint. The new iteration of the wing connector hub works around these issues. Also, Mechanical Design found the maximum range of height drop the reinforced balsa wood electronics housing can endure, from 0.5 meters to 1 meter. This isn’t a great estimate, as most of the impact forces will be distributed onto the fuselage, not the housing directly. The team will also begin performing in-flight conditions on the wing assembly.
Fabrication team has completed manufacturing the election housing using balsa wood reinforced with a fiber-glass layup. This material makes the housing light-weight and strong enough to hold the electronics. The team is continuing laying up and sanding the control surfaces of the wing. Overall, the wing assembly is ready for wiring and monokoting. Once that is done, the electronics in the wing cannot be accessed.
Ground Station is investigating the MAVLink modules used by the open-source program, APM Planner. They are locating the critical segments of the code. The team has also found the open source PixHawk code to see how APM Planner interfaces with MAVLink. Ground Station has also made progress with their database design. They have fixed the mission saving and loading file issues, and created a preliminary prototype of the Mission Recap function for debugging the code changes.
The Software division of Avionics continues their work in programming the PixHawk. They have modified the file that controls the plane’s flight mode, control_loiter.cpp, using hal.console to debug the print statements. They also decremented user-defined values in the UserCode.cpp so that the program checks the value in Loiter Flight mode and displays successive stings upon check. These UserCode and console codes control how the input and outputs are printed. The team lead, Kyle Lam, stated that they may not need the sensor prototype to test these code changes, because they are only looking for output values. Then, the Hardware division is redesigning the battery bus with higher resistors values and working on the switching circuit. The circuit was originally using two TH-2 mixers but now they want to use one or two mux x 7 or design their own. Avionics’ next task is to find where the LiDAR values are stored in the PixHawk and replace those values with real-time data.