As part of the design for Krobohand, we are using electromyography (EMG) to control the actuation. Through EMG sensors, users will gain greater control of their prosthesis. We originally began working with the Olimex SHIELD-EKG-EMG on an Arduino Uno microcontroller. Using the proprietary software ElectricGuru, we were able to analyze signals from the targeted muscle group through the shield. However, we found that it was difficult to acquire a raw signal to use in the Arduino 1.8.1 software. The shield took the voltage signals and filtered them in a way that worked with ElectricGuru but made it confusing to effectively program for.
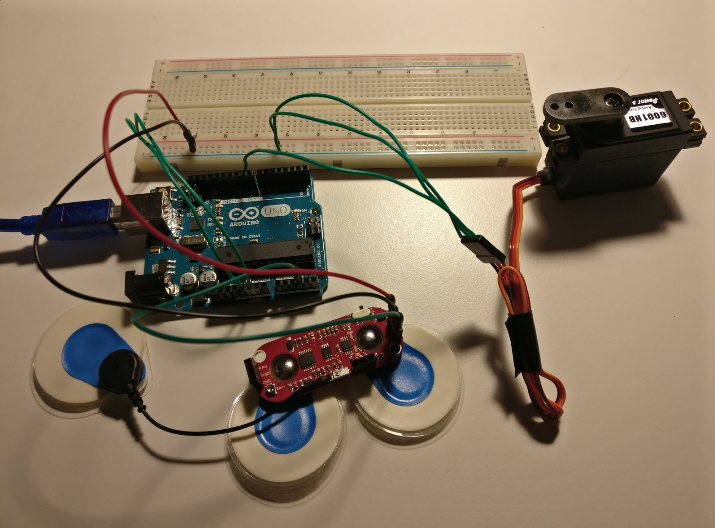
We have since moved to the MyoWare Muscle Sensor. This EMG sensor is much easier to program for and have had more success. In addition, the MyoWare sensor is much smaller as it needs only three pin connections to read one muscle group compared to the Olimex that requires a shield that must be mounted onto the Arduino Uno to read one muscle group.
The voltage readings we receive are given in a number range from ~200 to ~900. These signals are usable and as such we have made much more progress using MyoWare. We recently completed testing of the sensor to read signals from targeted muscle groups and were able to successfully actuate a servo motor in response to muscle contraction. We are now currently working towards refinement of our controls to more accurately convert the muscle signals to actuator motion.
The following is a video of our recent actuation test:
We will soon be running a test of a servo motor and linear actuator in tandem to fully actuate a full finger structure.
Thank you,
Krobohand Group