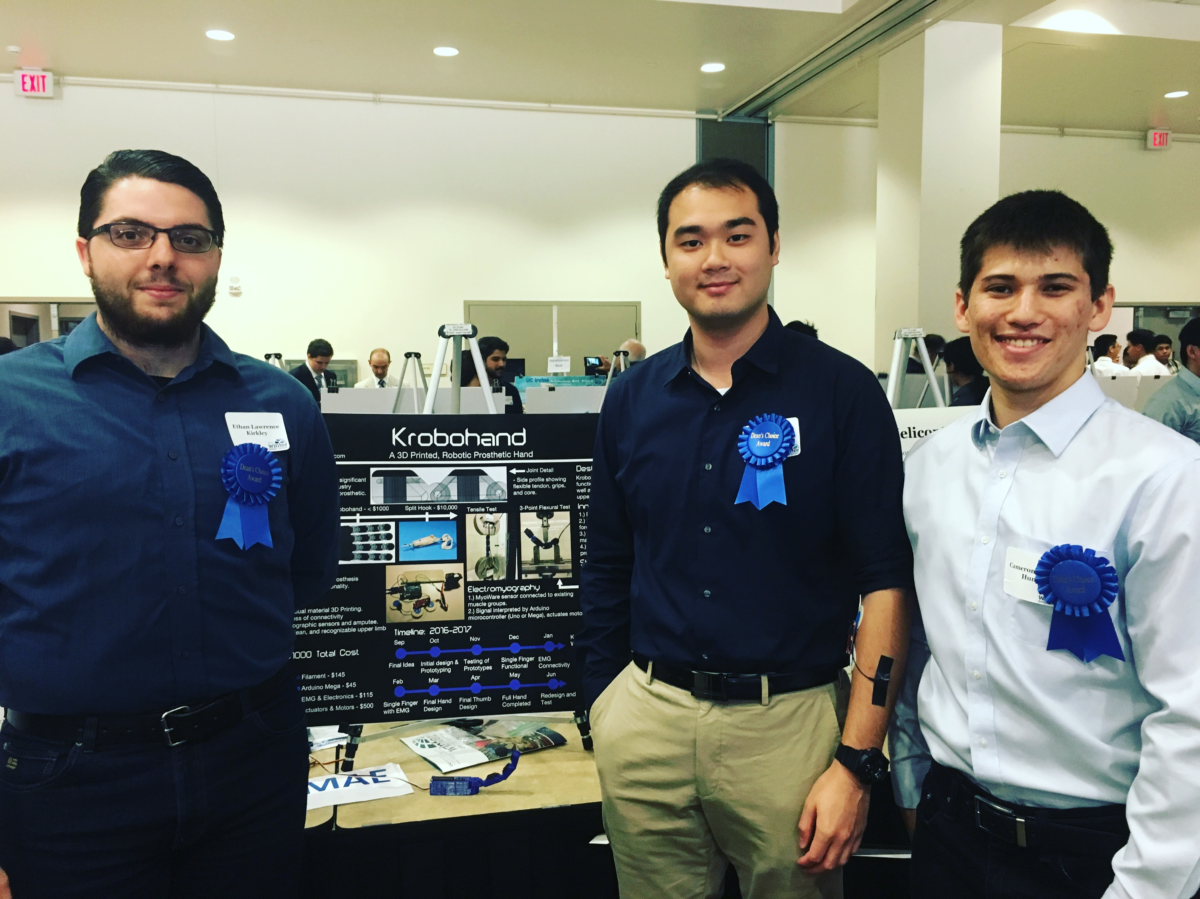
We’re ecstatic to announce that Krobohand took first place in the Beall Competition, in doing so giving us $7,500 of funding to continue to develop our ideas. We plan to use this money for multiple purposes, including but not limited to incorporating our company, approaching a patent attorney, electronics or materials we’ll need once our MAE funds run out, as …