The project is up and running to get the plane assembled and flying.
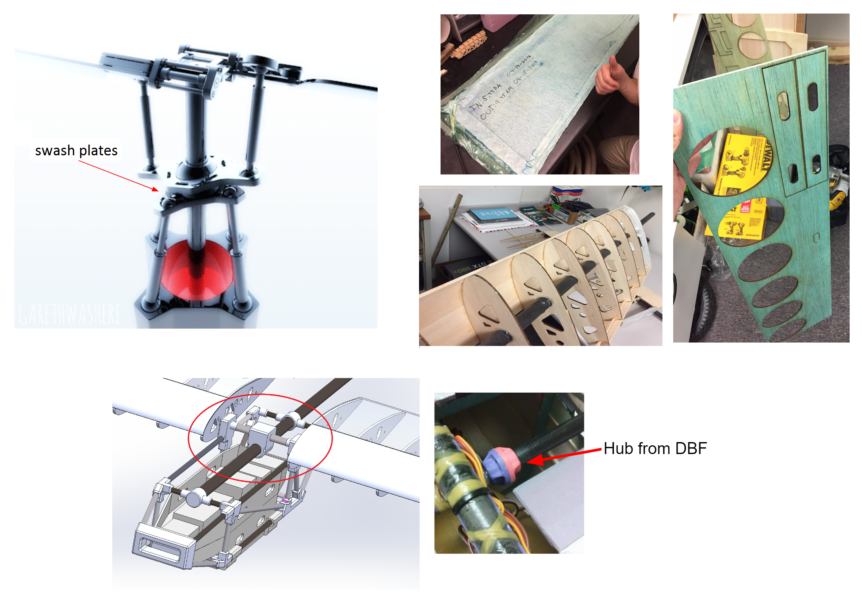
Propulsion was working on the tilt rotor’s motors and swash plates. They have synchronized the two motors’ speed so that they spin but they are not sure if the spinning is the same. The propellers must spin at the same rate (revolution per minute) to produce equal lift. They are also synchronizing the two swash plates, which control the angle of attack, pitch and lift. Our system has three servos at 120 degree angle.
Mechanical Design is creating hub parts that connects the 2-piece spar together. The spar that holds to the wing assemblies has been cut in half due to manufacturing issues and now Mechanical Design must work around this obstacle. These hubs will be based off the hubs of Design, Build, Fly’s old plane. The team is also performing drop-test simulations on the frame and electronic housing.
Fabrication is working to finish the wing assemblies and electronic housings. They are making more material for the electronics housing prototype and are applying the bottom of the wings using balsa sheets. Fabrication is also finding ways to work with the wing’s sharp trailing edges. They cannot apply the fragile monokote, therefore, they may use foam pieces as spacers.
Ground Station has created a timeline of tasks this quarter. They are a smaller team this time so they will be focusing on designing, researching, and testing their feature functions. Ground Station has documented their graphing code and this is their first week on researching MAVLink. They have found the list of all MAVLink keywords and commands. They also are using MAVGen, a tool that enables developers to define their own “dialects” of MAVLink and C++ code. Ground Station will be working with Avionics to test whether MAVGen is compatible with electronics.
Lastly, Avionics is configuring their electrics for the next testing stages. The Software division is researching on the ArduPilot codebase. They are brainstorming ways to command the plane to return home or return to the launch site (RTL). The LINDAR is producing output readings from the AUX port and the team is debugging the code in order to find the function for RTL. They already know how to program an RTL function, they need to know whether the plane understands the command from their code. Using three Pixhawk units, Software is assigning individual Pixhawk tasks to their members. The members will use the Linux-based programs Ubntu and NuttX to compile the Pixhawk code ware.
Then, the Hardware division is finishing up the tilt rotor test platform with the installation of modular connectors caps. The division is still waiting on their parts order for their first battery bus prototype.