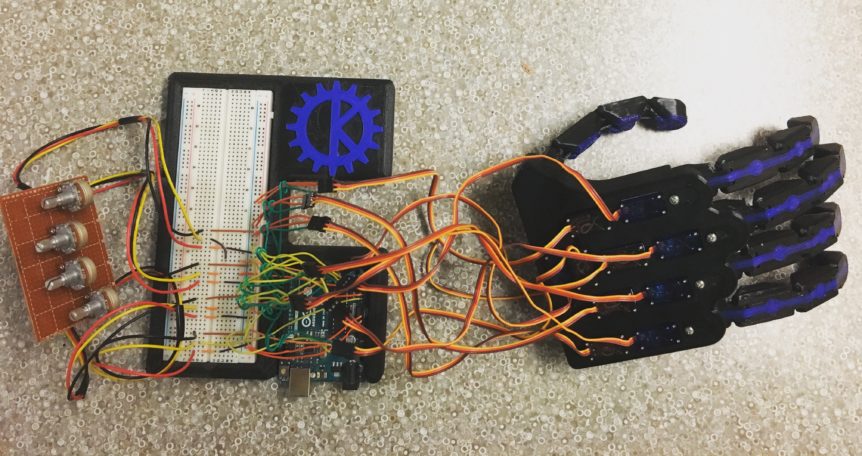
We’ve come upon our first official prototype, able to perform the three basic motor functions we’ve been designing for: lateral digit movement, closing of all digits, and moving the thumb inwards and away from the palm. The lateral movement of the fingers, and the extra degrees of freedom in the thumb is what we think set the Krobohand apart from other prosthesis on the market.
Although we still need to properly connect an external lithium-ion battery pack, which we are currently making ourselves from individual cells, we’ve been able to test these movements using just computer power directly through the Arduino, but without the ability to perform all movements simultaneously, as the Arduino will cut out and the servos don’t function properly due to a lack of amperage.
So, our next steps forward are to continue to optimize the palm and thumb design, create a proper battery pack with the voltage and amperage requirements, as well as begin designing and prototyping a wrist socket/joint structure which will allow us to connect the Krobohand to an amputee.
We’ve attached a picture of our current prototype as the main header picture.
Thank you,
Krobohand Group