For the past week, Timothy and Alejandro have been building the test bed.
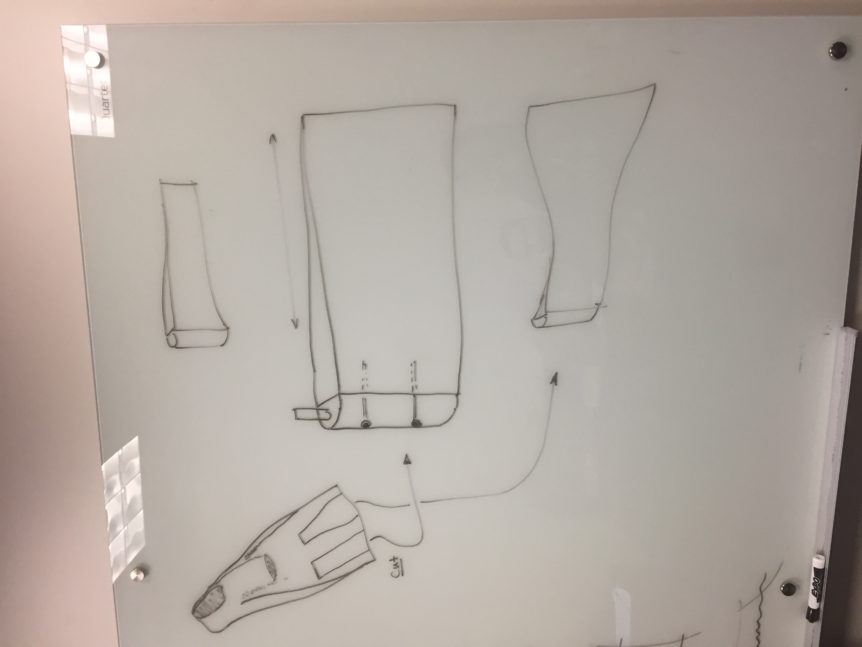
Bon and Damian have been drafting more designs for the fins. At last week’s team meeting, Professor Tryphon made suggestions for the fin designs, pictured in this blog. We plan to cut out part of a snorkeling fin and test the different fin shapes to see which one is more efficient.
Alejandro also has our wire diagram set up to move the fins and the traditional propellers to compare the efficiency. Two linear servos and two rotational servos will be used to move the fins and a motor will be used to move the traditional propeller.
Also, this week, our team will be preparing for the peer design review on February 22, 2017, and produce the Arduino code for the controls.