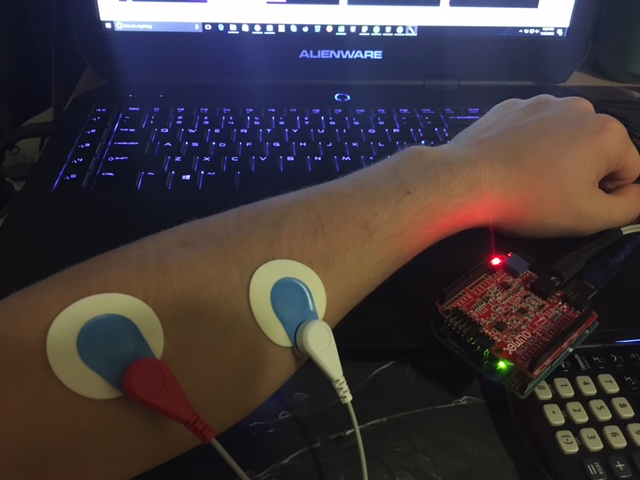
As we have explained in prior blog posts, we plan to use electromyography(EMG) as our main form of allowing the amputee to control their Krobohand device. In the future, we may consider some form of hybrid of manual and EMG controlled prosthesis, but for now, we will be sticking with strictly EMG controlled via Arduino microcontroller and shield. We have made significant progress in determining how to properly use the signals that we receive from the EMG sensors, by testing it on our own forearms. Though, we plan on testing other parts besides the forearm, as we will need a wide range of muscle groups to accommodate as many amputees as we can.
By using electromyography to control the actuators and servo motors of the Krobohand, we think this will allow amputees ease of use. Our progress thus far with EMG is as follows. We have obtained our Arduino microcontroller and shield, as well as sensor leads that would constitute one sensor for our Arduino. Furthermore, we have compiled Arduino code libraries in order to create a visual output of the EMG. The visualization of the digital signal collected by the Arduino demonstrates some of the noise that we will need to attenuate when we move to use the EMG as a means to control the actuators and servo motors, which will ultimately be what makes the Krobohand function.
We still have much work to do with EMG and connectivity, but we’ve made great strides in the process, and we think we’re on the best, most efficient path.
-Krobohand Group