Hi everyone,
Last week, we received most of our equipment needed to begin manufacturing our MVP Prototype. We have spent these past two weeks taking what we learned from our proof of concept to improve upon our design. In order to get the most efficiency out of our short time, we divided our work meetings to the manufacturing team and the circuitry/controls team. Because of this, each sub-team have provided their own update, and is shared in the next two paragraphs.
Circuitry/Controls Team
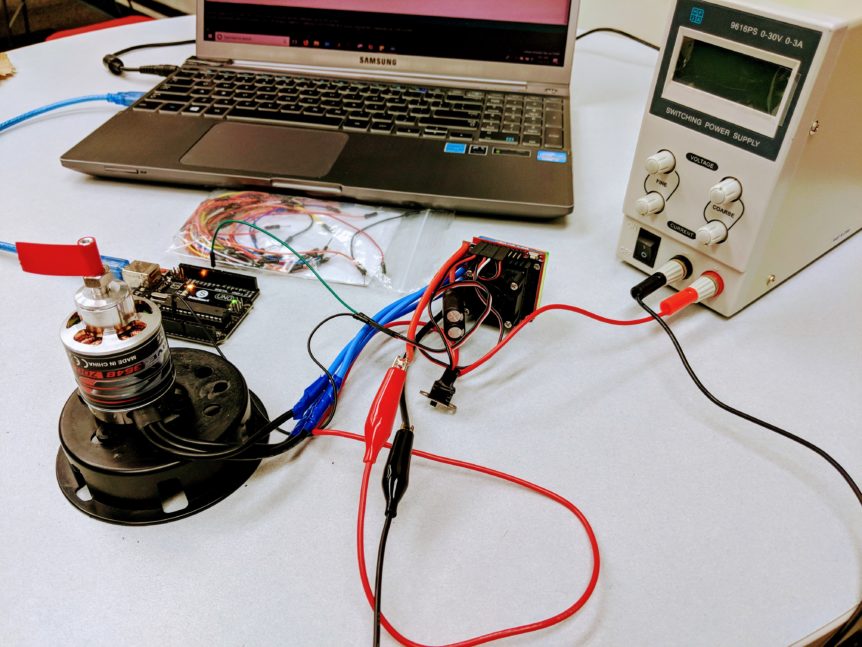
For the circuitry team, we have ordered new parts and assembled them together in order to meet the needs of the MVP prototype. We purchased a brushless motor with a max current loading of 45 A in order to rotate a bigger spool, heavy gears, and more cable. But in order to control the speed and direction of a motor with such high amperage, we purchased an ESC (Electronic Speed Controller) in order to accommodate for that. ESC’s work similarly to our L298N H-bridge from our POC, and was therefore the right substitute for our MVPP. Furthermore, some tweaks needed to be made in our code as a result, and we have been working hard to get that working smoothly. Other products that were purchased include a power supply for the cable and the motor, a slip ring to connect to a rotating spool, and a circuit mount. Lastly, regarding our drone, due to some minor setbacks, we are unable to use it for the moment, and will be on standby until further notice.
Manufacturing Team
This week, we made several upgrades to our reeling system. We increased to a 7-inch diameter spool in order to hold much more wire, so that we can achieve our goal of a 200 ft tether. However, depending on the maximum payload of our drone, we might have to scale down on the cable length in order to allow for better flight maneuverability. We see a possible scale down to between 180-200 ft. We also added a 2:1 gear assembly connecting the brushless motor to our spool in order to generate more torque. We plan on completing the reeling assembly in Week 8 so that the Circuitry team can run tests and see how their programming and assembly performs on the actual spool system.
-Drone Tethering Team 2017-2018