Hi everyone,
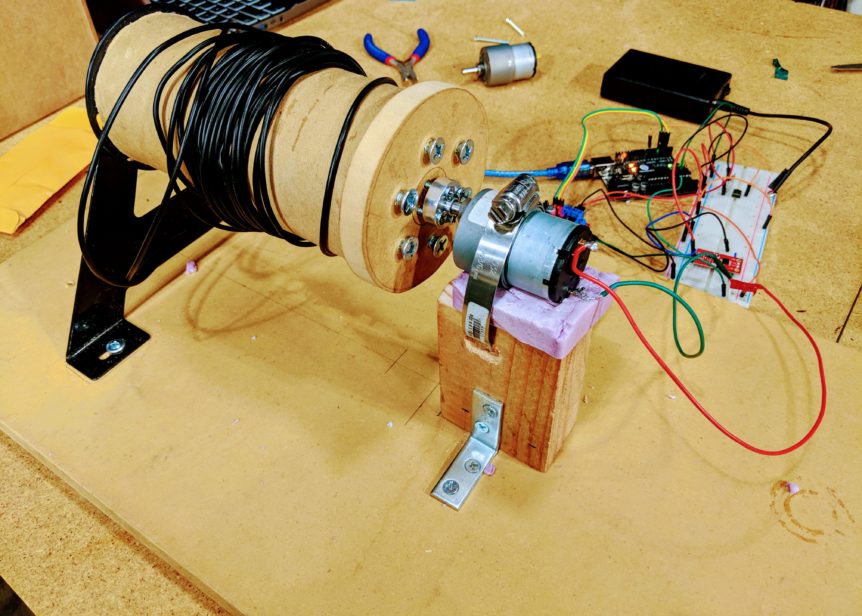
Last week, our team was able to construct and complete a proof of concept in order to gauge the feasibility of our concept in the real world environment. As seen in the photo, the motor is connected to the spool via a screw set, and we were able to successfully spin the spool no problem. The motor is connected to the microcontroller on the other end, which controls the speed of the motor using an H-bridge and a current sensor.
This week, we are using what we learned from the proof of concept to further refine our design, carefully considering what went right and what needs to be improved upon. Upon discussion with the team, we are now finalizing our purchases for the MVP prototype, and expect to begin manufacturing it by the start of next week. In the meantime, we are continuing to improve upon our design and thinking of any potential problems that could occur on the tether system as well as the drone.
In the end, we are confident about the progress that’s been made and will continue striving to complete our MVP prototype by the end of week 7.
-Drone Tethering Team 2017-2018