
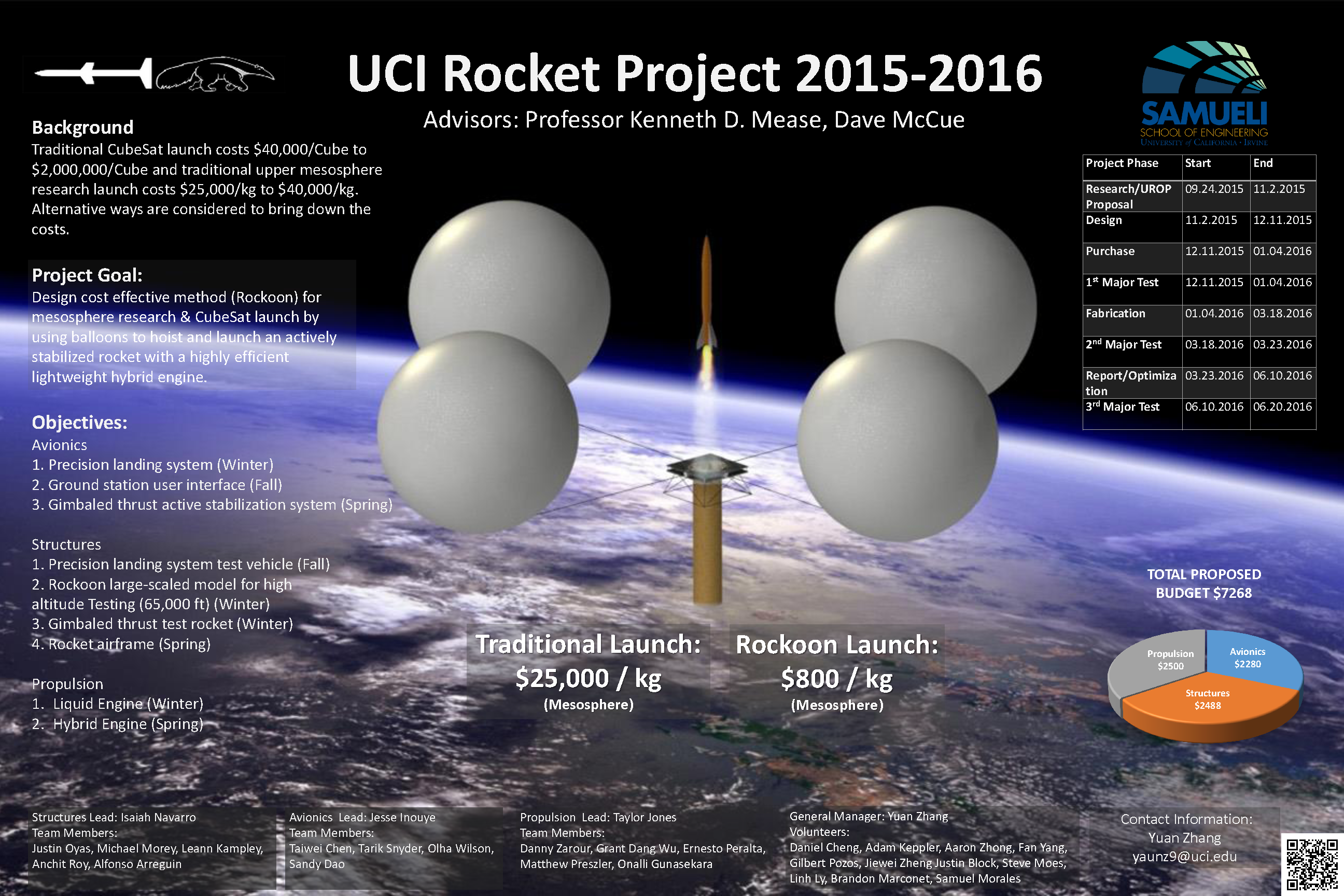
There are many advantages that make rockoons a worthy technology to research and consider for application, with many of them arising in comparison to the conventional launch method. The major benefit is the cost of the vehicle itself; by replacing the first stage of a multi-stage rocket with space balloons, costs are reduced by a significant factor. For example, the launch cost of ARCAS, a sounding rocket that can bring a 4.5 kilogram payload to an altitude of 52 kilometers, was 2000 dollars in 1960. By taking the inflation into account, the launch cost of ARCAS is around $16,083 in today’s dollars. For another example, to bring a 4 kilogram payload to an altitude of 70 kilometers, the four major aerospace companies in China gave the quotes range from 98,123 dollars to 163,538 dollars. However, if we use rockoon, the launch cost to an altitude of 50-60 kilometers will be the cost of solar balloon (around $90) plus the cost of the rocket fuel. Even if we use the helium balloon, the launch cost still lower than the traditional sounding rocket. The launch cost will be the cost of balloon and helium (around $1,000) plus the cost of the rocket fuel. Since we launch rocket from high altitude, the cost of fuel will greatly lower than traditional sounding rocket. The second advantage of rockoon is the reusability; the launch platform can be recovered easily and prepped for another usage simply by replacing the balloon. Lastly, rockoons are more environmentally friendly than conventional launch method. The removal of the first stage of a rocket comes with fewer emissions and thus a lessened impact on the environment.
However, with these benefits come some notable disadvantages, which we will attempt to remedy in our study of the rockoon vehicle. A major shortcoming is that balloons cannot be steered; thus, neither the direction the launched rockoon will float nor the region where it will fall is easily controlled. Without guidance, a large area must be required to allow the rockoon ample room to land safely. A possible solution to this issue is a guided Ram-air parachute precision landing system, to guide the vehicle on its way down to a designated landing point. Secondly, the launch pad must be kept stable while the balloon rises, especially under wind turbulence in the upper atmosphere. We will attempt to meet this demand using a gyroscopic gimbal that utilizes a low center of gravity to stabilize the rocket without using electrical components that may add weight to the device. Lastly, a rockoon may end up to prove costly when certain design decisions are made. For example, using helium balloons may not result in a worthwhile cost reduction from a conventional launch method, as helium is expensive. To remedy this, we resolved to use a solar hot air balloon, cutting down on costs significantly.
1. Design and build a hybrid engine rocket with passive stabilization system that has ability to reach space (100km) via rockoon
2. Developing ram-air parachute precision landing system
3. Design a hybrid engine rocket with active stabilization system that has ability to reach space (100km) via rockoon
4. Rockoon Platform High Altitude Test
Avionics: Jesse Inouye
Objective: The main goal of this project is to develop a gimbaled thrust rocket active stabilization system that can measure the rockets position and orientation in real time and ensure that it stays on its intended flight path. The system will counteract any disturbances that could potentially cause the rocket to deviate from the desired flight path. This will be accomplished by implementing actuated gimbal that will steer the engine and create moments on the rocket during flight. After developing the system in test stand we will perform a physical test by attaching the system to a water rocket. We choose water rocket because it allows us to do the test on campus. If we use chemical engine, we have to drive two hours to dessert for every tests due to the regulations. The second goal of avionics team is to develop a precision landing system. This system is an automatic ram-air parachute. It can bring our rockoon platform and rocket back to desire landing site. We came up with this idea because we cannot steer the balloon, but we can steer parachute.
Structures: Isaiah Navarro
Objective: The main goal of structures team this year is to optimize Rockoon platform design. Structures team will finish the fabrication of rockoon platform helium balloon version prototype 2 and conduct test during spring break. Structures team will also design and build the airframe for this year’s main goal: hybrid engine rocket that has ability to reach space (100km) via rockoon.
Propulsion: Taylor Jones
Objective: Propulsion team has two main goals this year. First, finishing the fabrication of liquid propellant rocket engine from last year. Last year, we finished 80% fabrication of the rocket engine. We will finish it on fall quarter and conduct static fire test on winter break or winter quarter. The second goal is to develop a hybrid rocket engine for next year’s goal: reaching space. We have a liquid propellant rocket engine that uses liquid oxygen as oxidizer. We realized that using liquid propellant rocket engine that we currently have in rockoon system is not feasible due to the following reasons. (1) Liquid oxygen needs to be filled into the tank right before that launch. However rockoon platform needs around 1-2 hours to reach the desire altitude. (2) Plumbing, valve, and tank system will be very complicate for liquid propellant engine and that system will be heavy also. We choose to use hybrid engine rocket because it relatively simple and also has relatively high performance. It is the best choice for rockoon system.

UCI Rocket Project Rockoon System Prototype 2 Fabrication Update
May 29, 2016UCI Rocket Project Hybrid Engine Mold is ready
May 29, 2016UCI Rocket Project Prototype 2 Rocket Avionics
May 25, 2016UCI Rocket Project 2nd Rockoon Platform Avionics
May 25, 2016
Ken Mease
Professor, Advisor
kmease@uci.edu
http://fdcg.eng.uci.edu/
Dave McCue
Advisor
Donate to this Project