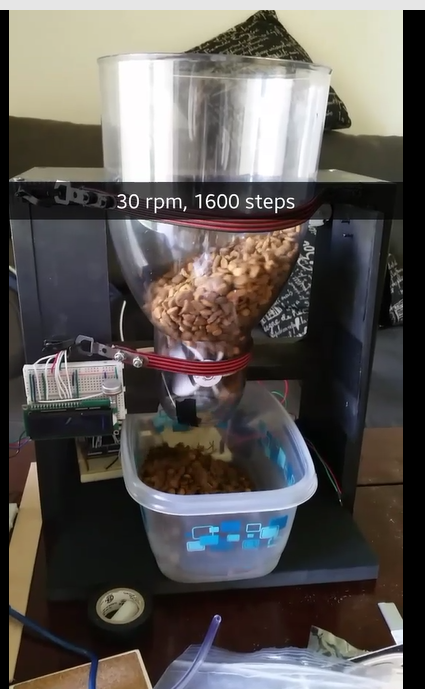
New electrical components were received to continue working on the subsystems. We meet with both the industry sponsor and adviser once so far to receive feedback on the prototype. Subsystem 1 received a new motor with a higher torque capability, holding torque is 1.9Nm. It can make full rotation currently dispensing more than the desired food quantity, but it will be fine-tuned. The Goal is to have it ready to incorporate by the end of week 4. The motor optimal performance so far is at 30 rpm, the control of rotation is dependent upon 2 variables in the code. Subsystem 2 has been working on incorporating bulk component into the circuit between the pumps voltage and current input, and the output of the AC to DC converter. The converter currently output 5V, 5A; however, the desire drop is 3V and .37A or 5V and .52A which are the recommended pump voltage and current input. Although a bulk component is usually used to drop current the bulk module being used has both a current knob and voltage knob. There must be a load for the bulk module to output current. Subsystem 3 will be working on a touch screen display and create the interface that will allow pet owner to input the dog’s ideal weigh for feeding and supplement with an option to overwrite any of the setting per customer preference. Subsystem 4, the external design is completed, and now the fine detail such as spring, bolt, and nuts and manufacturing procedure are being researched on.
Sandy Moreno, Integrated Pet Feeder for Health and Wellness