So far, UAV Forge has been a little slow this week. On a side note, an important aspect of our project is the team-building. Every spring, UAV Forge makes team t-shirts for our members. It is a great opportunity to help the project feel united and to remember that we are working towards a common goal.
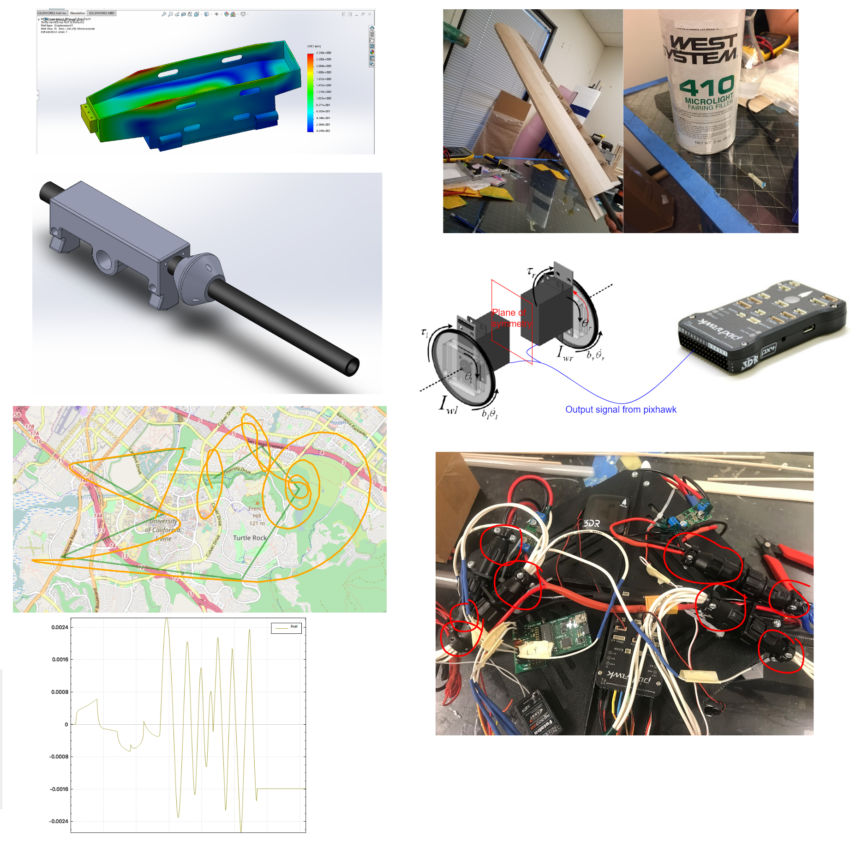
The Propulsion team has synched the two tilt servos but the servos are turning in opposite directions due to their symmetrical set up. To correct the error, the team used a test servo and reversed the polarity of the signal, but this burnt the servo. The team will test another solution: splitting the control signal and applying the signal into two different ports of the Pixhawk. This solution is not preferred because the servo’s response may lag.
The Mechanical Design team re-tested an FEA simulation on the electronic housing using balsa wood as the material property. They found that the balsa wood did better than ABS plastic. The team has designed the “hub” modular wing connector prototype. The plane needs a reliable secure fastener that will hold the two-piece spar. One obstacle the team encountered was the size of the hub. The wider the hub, the farther the wing assemble is from the body of the plane and this affects the plane’s performance. Mechanical Design is continuing to optimize the plane’s fuselage for manufacturing. It is easier to make a fuselage that conforms to familiar and common shapes.
The Fabrication team has completed attaching the balsa sheets onto the wing’s trailing edge. They need to clean up the wing, such as filling gaps with epoxy, sanding the wings and then monokote them after. The team will assemble the second half of the electronics housing.
Ground Station is researching the capabilities of MAVLink. They found MAVGen works with C, but not with C++ yet. The team has prepared a list of questions for Avionics to better understand how MAVLink is integrated into the electronics. Ground Station improved the outputs of the UAV simulator to be more realistic. The simulation returns sensible data, the velocity displayed is now normalized, and the plane’s path are smooth and curved, not straight, sharp turns. Lastly, the team is learning MySQL to complete and debug the final steps of the GUI’s database code.
Avionics is finished installing modular connector caps to secure and make all the wiring modular on the tilt rotor prototype. The team is still working on making the battery bus prototype as parts come in the mail. They are also working on the Pixhawk and Ardupilot code to find functions related to RTL commands. Avionics is looking into the MAVLink coding within Ardupilot to help Ground Station with their programming work.