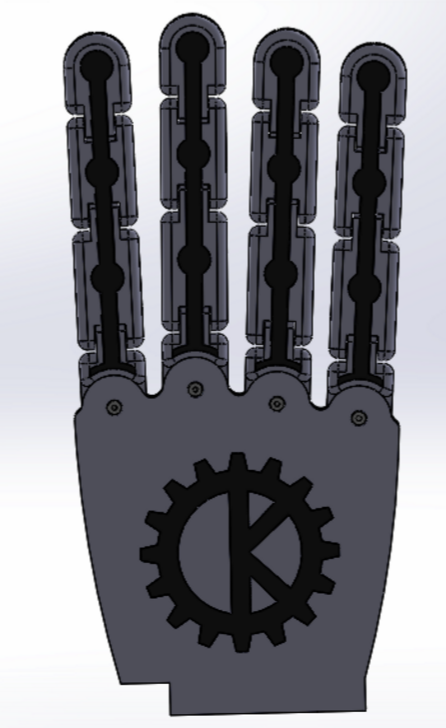
The designs of both the lateral joint and thumb have been evolving extensively. Many iterations have been gone through the entire process of drawing, 3D modeling, printing, and testing for viability. We are close to what we think will be the most efficient, effective, and viable design. The requirements for these designs focus on ease of printing, as well as high functionality while in use.
Initially, we planned on the lateral design being composed of entirely 3D printed segments, but have decided that in doing so, if in the future any parts of a finger were to broke, the amputee wouldn’t be able to easily switch out a finger. To avoid this kind of situation, making a finger easily removed and replaced would be ideal. Each finger, as well as the thumb, will be attached by hardware – either a screw, or a bolt and nut. The lateral joint will be actuated by means of a pull-pull system with a servo motor. The exact motor choice is still being decided upon, as we want to ensure a proper motor choice for an amputee’s needs.
The thumb design is much more complicated, and not in a proper stage to show quite yet. Currently, we’re trying to achieve the three main movements of a thumb:
1.) Towards and away from palm.
2.) Towards and away from fingers.
3.) Open and closed position of thumb joints.
If able to achieve these three movements, the Krobohand will be that much closer to human hand mimicry, thus improving functionality. To do this, we’re currently thinking of using one servo motor, and two linear actuators. The servo motor will cover the movement of moving the thumb towards and away from the fingers, while one linear actuator will bring the thumb structure towards and away from the thumb. Finally, the last linear actuator will both open and close the thumb. We will also incorporate our integrated flexible tendon design which has proved successful in our finger design on both the thumb joints, as well as the thumb structure connected to the palm.
We’re in the process of prototyping both the lateral joint and thumb designs, as well as actuation of a single finger, and hope to share significant progress in the next couple of weeks.
Thank you,
Krobohand Group