Hello everyone,
We spent the winter break and the first week of the quarter researching, designing, and CADing our torso redesign. It is currently on its 2nd iteration and further modifications will occur until its design is finalized. We are also excited to announce that manufacturing will begin to produce the arm, head, and torso of our robot. Using files from the InMoov website, we will begin 3D printing parts, first starting with the arm. As parts are produced we will begin to put together the arm so that we can figure out its full range of motion and begin planning towards integrating our coding. We expect to see a full arm in the upcoming weeks that is ready to be tested with our code.
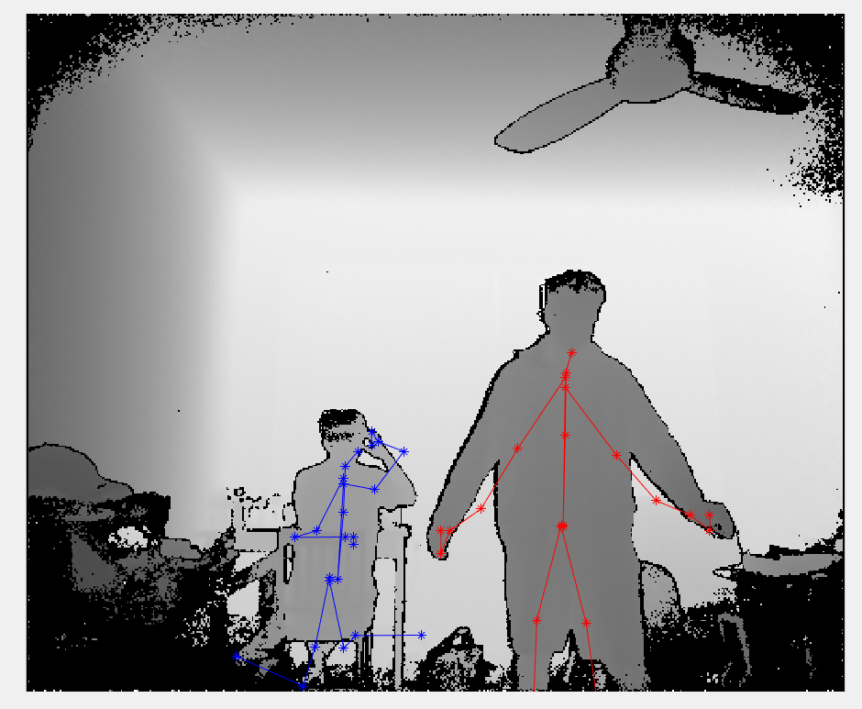
Concerning our code, we have been able to take input data from a Kinect and utilize a MATLAB script that provides x, y, z coordinates of 25 joints. We can convert these coordinates into unit vectors that an Arduino can use to allow the robot to move. The picture provided above shows how the Kinect perceives individuals interacting with it. This is how the robot will see guests and determine how to proceed using the visual input it is receiving from the Kinect. Along with manufacturing parts, our next goal is porting data we have from MATLAB over to an Arduino. We will continue to utilize InMoov and its open-source community to help us with this endeavor. The Interactive Humanoid Team is excited for the upcoming weeks and ready to work hard.