The Propulsion team is still working on mirroring the control signal of the left tilt rotor to the right rotor. The team is also working on the battery cage for the tilt rotor prototype.
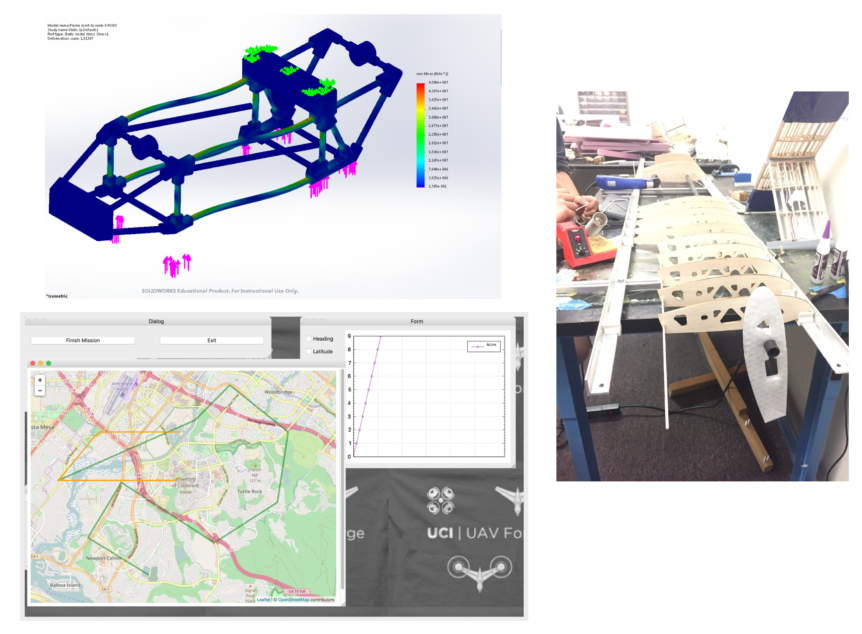
Mechanical Design has completed one phase of FEA on the plane’s frame. Using a static deformation simulation, they have calculated the frame can withstand a 1000N force. They hope to perform a successful simulation of a drop test later. The team is almost finished with designing the internal housing for the electronics. The housing will protect nine electrical components, including a battery. The team is also working closely with Fabrication to ensure that the joints of the frame are designed within the tolerances of our 3D printer. Mechanical Design learned the holes for the rods to fit in the joint need to be enlarged by 2%, otherwise, Fabrication must manually expand the holes with filers. The team lead of Mechanical Design, Cameron, is still designing the new fuselage.
Fabrication is working on the wing assembly by honing their craft. They are re-doing the control surfaces so that they are more well-fitted and are continuing to 3D print the frame components. Fabrication will operate on whatever Mechanical Design finishes.
Ground Station is working on improvements with the GUI, such as window sizing and debugging. They have updated the Leaflet Mapping and made small changes on the GraphWidget to make it user-friendly. Ground Station also has finished a second revision of the network protocol definition.
Avionics is working on the plane’s sensor components and general circuit schematics. They are reviewing ArduCopter modules for the sensor data variables. Then, the team found that the Pixhawk can print the output to the console without an Arduino, so they can now focus on getting the Pixhawk to read the inputs from the obstacle-detecting sensor. Avionics has also completed the servo/power system diagram for the new double TH-2 layout. The team will be using two TH-2 mixers instead of an Arduino to control the plane.