Progress was slow this week and the Project Lead, Cheng, took the time to teach Ariel and Kristen about the main aspects of UAV Forge. This includes the basic Pixhawk Mission Planner Software (the one Avionics didn’t program), preflight checklist procedures, the quadcopter configuration procedures, auto-flight testing, and flying the quadcopter prototype manually.
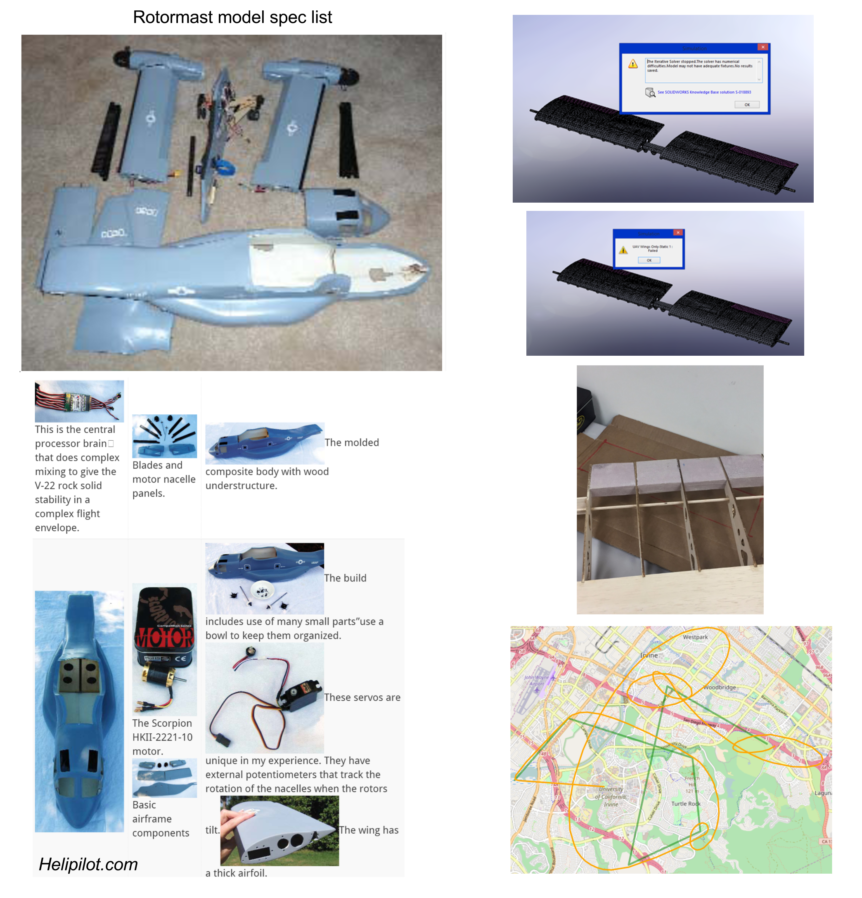
Propulsion is purchasing a model tilt rotor kit, Rotomast. To save money, they plan to by only the parts that they need, UAV Forge has most of the materials already.
Mechanical Design is still working on the in-flight stress conditions for the wing and spar assembly. They are facing error messages regarding the boundary conditions. The team is also planning to help Fabrication to assemble the frame.
Fabrication has attached foam pieces to the trailing edges. There was one issue where the foam melted when the team used cyanoacrylate glue or CA glue so they used a different adhesive instead. The team continues wet-sanding the control surfaces and cut more surfaces. The team will prepare the wings for wiring and monokoting.
Ground Station worked on the UAV map simulator using MAVLink messages. The simulation can send packets but only receive heartbeat packets. Heartbeat packets are messages between the UAV and Ground Station program that inform the user of the UAV’s status; it’s a check to make sure the UAV is operating. They are working on integrating MAVLink messages with the Ground Station server by removing references to the old code and establishing new MAVLink functions. The team also fixed some multi-threading bugs in the server code in the process. Overall, Ground Station continues to change the current base project in preparation for the switch to MAVLink.
Avionics is continuing the locate the LiDAR variable in the Pixhawk code. They know that the variable can be inserted into their code and enable the plane’s obstacle avoidance capabilities. The team is also purchasing mosfets and a Pixhawk 2 for their work (the switching circuit and battery bus prototype).