Week 5 Reflection
Since last week, our team has been adjusting the control system on a fly bar helicopter. Adjust the angle based on the transmitter and the data provided by the manual. When the swash plate is at its initial position, the angel of the main rotor is not zero since it needs to provide enough lift to support its own weight during hovering. We adjusted the transmitter so that the angle of main rotor can change steadily as the transmitter control bar is moved from bottom to the top. There are three different modes for helicopter. Mode 1 is a standard mode for all helicopters, which does not perfectly fit our helicopter. Mode 2 is for our helicopter. Mode 3 is for helicopter with 5-kg payload.
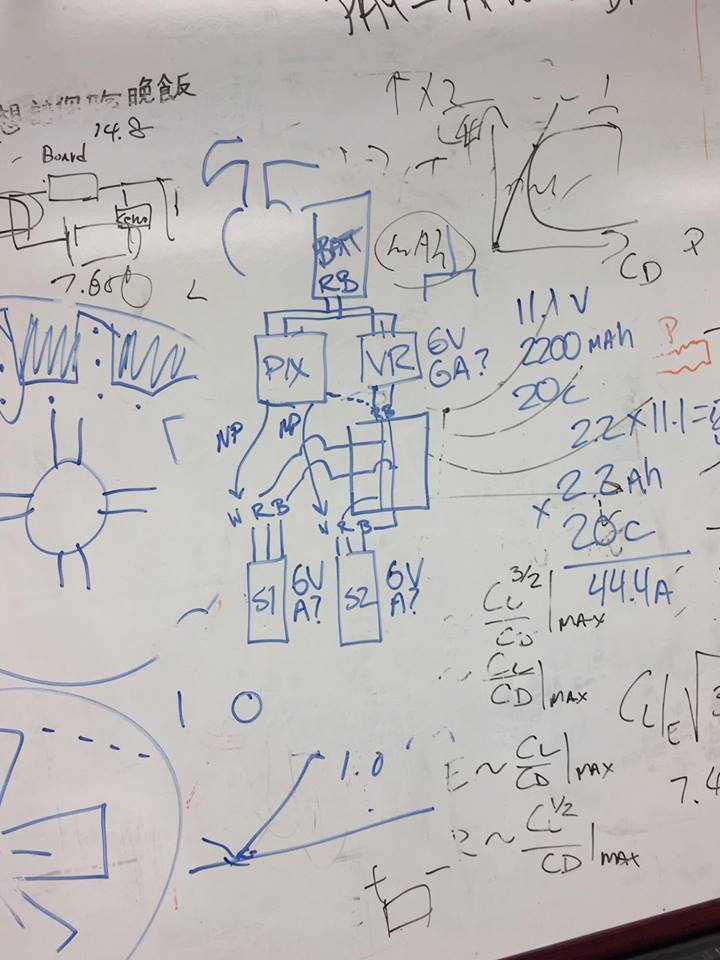
Moreover, from last week, we had discovered that the voltage from the pixhawk that we are using for autonomous flight is not enough for us to power all of our servos for out big helicopter. Therefore we are trying to power the pixhawk and the servos separately. In order to power the five servos which are in parallel, we decided to buy a circuit board and split the wires into three pieces, which the data line from the servo will be linked to the pixhawk for signal and the other two wires link to the circuit board with the battery. For capacitance of the battery, we choose 4000 mah. This capacitance cannot support our helicopter to keep flying for half an hour since the current demand by servos is large. But its weight is lighter and for test flying, this capacitance is enough.
At last, we found the required engine oil and decided to mix the oil based on the 1:30 ratio between premix oil and gasoline.