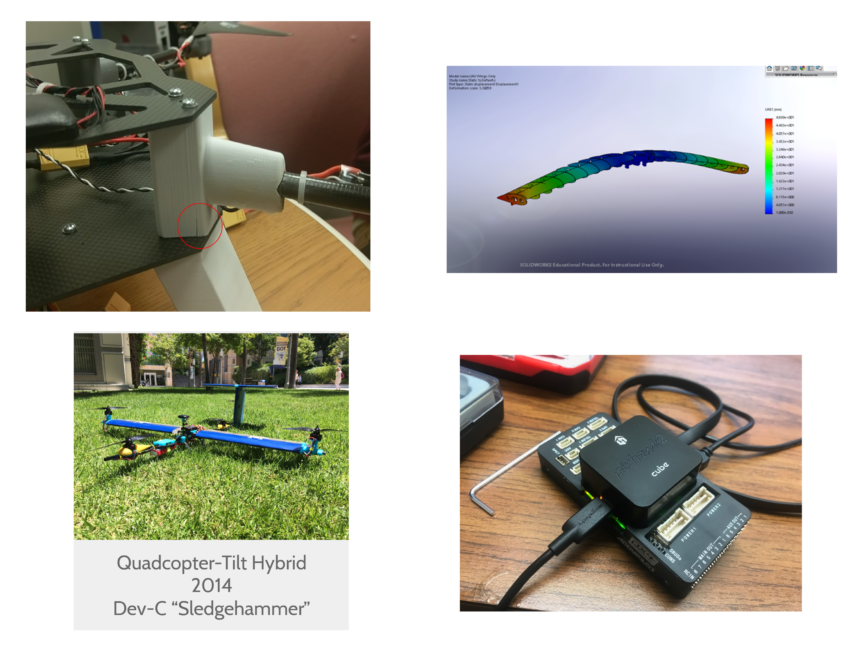
The Propulsion team worked on improving the quadcopter prototype. They successfully tested that the quad can “loiter” or hover in space while still adapting to the surrounding conditions. Before, the quad was drifting forward. During that previous test, Cheng found that the “trim” calibrator on the radio controller could fix the drifting temporary but it was a bad sign that something was physically malfunctioning on the quad. So, the team re-calibrated the motors to get the quad to loiter better. The team also found that the quad’s motors would stall when the ESC was receiving rapid changes in the input signal. And during their testing, the team discovered that the 3D printed parts on the quad have cracks. These cracks have propagated perpendicular to the print direction because the load forces were parallel to the print direction. To prevent cracks in the future, they will change the 3D printing orientation on the new parts. Propulsion is still waiting for the Rotormast kit to arrive.
The Mechanical Design team is continuing their FEA simulations on the wing spar and ribs. They fixed the previous error regarding the mates on the assembly. When the first simulation ran, the surfaces that represent the monokotes weren’t “flexing” properly. After changing the mates and meshing, they demonstrated how the wings were flex under the lift and load forces of the tilt-rotors. Mechanical Design also collaborated with Avionics and Fabrication to discuss how the electronics will be placed in the electronic housing. The modular wire caps were an unexpected challenge; the three teams had to figure out how the connections would be made during assembling and disassembly. They concluded that the modular caps won’t be mounted on the electronics housing but will be contained within the fuselage.
Fabrication team worked on the tilt-rotor prototype’s wiring with Mechanical Design and Avionics as previously discussed. The team is currently stalled on working on the wings and tilt-rotor prototype until the electronics are fixed.
Ground Station is continuing to test with the MAVLink message simulator. They found a new source of example code in the ArduCopter repository. They are also continuing to decouple the network code from the rest of the program, still need to update the GraphWidget, MapWidget, and Database.
Avionics has received their parts in the mail, the Pixhawk 2 and MOSFETs. With the MOSFETs, the team is making their switching circuit prototype. Avionics is testing and configuring the Pixhawk 2. The Pixhawk 2 has a tilt-rotor mode (beta) and doesn’t require a Mission Planner calibration. The team is working on an Intel Edison integration of code and if everything works, Pixhawk 2 could replace the faulty TH-2 mixer. Then, from the discussion with Mechanical Design and Fabrication, it was understood that a new TH-2 is needed to test the tilt-rotor prototype. The only issue is ordering a new TH-2 via mail this late in the quarter wouldn’t be beneficial and in the past, the project has had too many issues with this electrical component. For overall testing, Cheng suggests using the Sledgehammer, a pervious plane UAV Forge created. The Sledgehammer operates on four rotors with a Pixhawk 2. To transform the Sledge to a tilt-rotor set-up, Cheng suggests removing the front rotor and operate the plane with the pseudo-three rotors. This is a risky option as the Sledge was probably not made for that type of set-up.