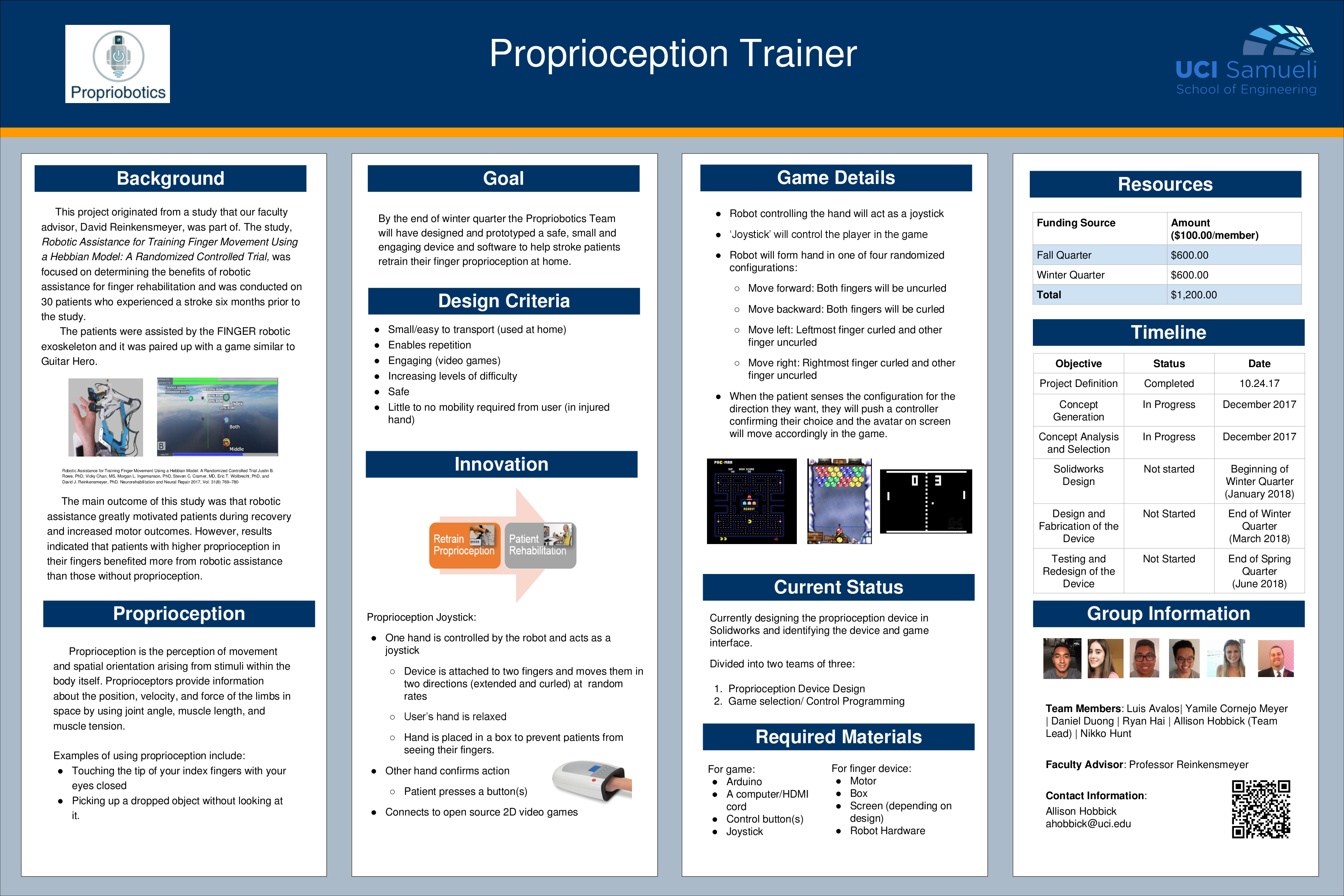
This project originated from a study that our faculty advisor, David Reinkensmeyer, was a part of. The study, Robotic Assistance for Training Finger Movement Using a Hebbian Model: A Randomized Controlled Trial, was focused on determining the benefits of robotic assistance for finger rehabilitation and was conducted on 30 patients who experienced a stroke six months prior to the study. The patients were assisted by the FINGER robotic exoskeleton and it was paired up with a game similar to Guitar Hero. The main outcome of this study was that robotic assistance greatly motivated patients during recovery and increased motor outcomes. However, results indicated that patients with higher proprioception in their fingers benefited more from robotic assistance than those without proprioception. Therefore, there is a need for patients without proprioception in their hands to retrain their proprioceptors before using the FINGER robotic exoskeleton.
Develop a safe device and software for helping people to retrain their finger proprioception at home after stroke
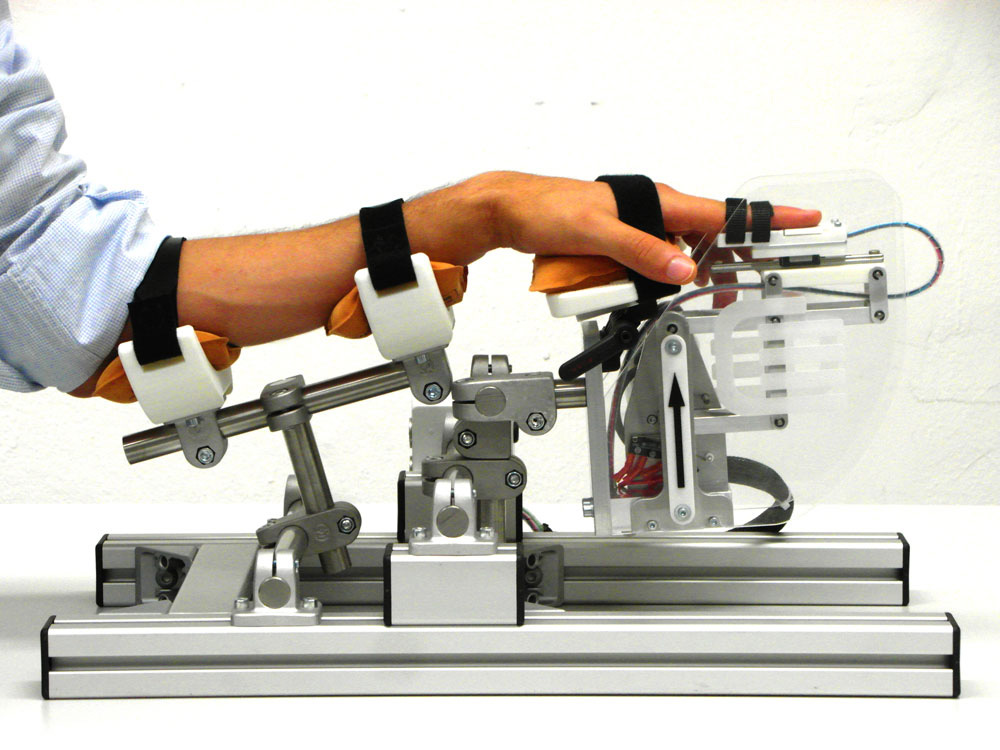
One hand is controlled by the robot and acts as a joystick
Device is attached to two fingers and moves them in two directions (extended and curled) at random rates
User’s hand is relaxed
Hand is placed in a box to prevent patients from seeing their fingers.
Other hand confirms action
Patient presses a button(s)
Connects to open source 2D video games
Last Name | First Name | UCI E-mail | Major | Grad Qtr |
|---|---|---|---|---|
Name: Allison Hobbick
Email: ahobbick@uci.edu
Team Lead
Name: Luis Avalos
Email: leavalos@uci.edu
Safety Manager

Name: Nikko Hunt
Email: huntnr@uci.edu
Document Manager

Name: Yamile Cornejo Meyer
Email: ycornejo@uci.edu
Purchasing Manager
Name: Ryan Hai
Email: hair@uci.edu
Team Member

Name: Daniel Duong
Email: duongdv@uci.edu
Team Member

Name: Jennifer Tran
Email: plta@uci.edu
Team Member
Initial Project Information
Project ID#
tbd
Course Code
19246
Project Type
Research
Field of Interest
Robotics and Rehabilitation
Description
To develop a safe device and software for helping people to retrain their finger proprioception at home after a stroke.
Maximum Number of Students
6
Requirements
tbd
Additional Information
Please feel free to contact our advisor or student lead!
Contact Method
Contact Professor David Reinkensmeyer ( dreinken@uci.edu) or Student lead Allison Hobbick (ahobbick@uci.edu).

David Reinkensmeyer
Professor, Advisor
dreinken@uci.edu